
The present dataset, called UFPR RSS Sonar Fingerprinting Map (UFPR-RSFM), SFM (3DFE) contains Wi-Fi strength readings in dBm (RSS) from fifteen Access Point sources, denoted by RSS1 to RSS15, sonar readings in cm from eight sensors, denoted by SonarN, SonarNE, SonarE, SonarSE, SonarS, SonarSW, SonarW, and SonarNW, and localization information based on two grid scales. The larger grid divides the workspace into four cells, each one subdivided by a smaller grid. The number of subcells in each cell varies from three to fifteen.
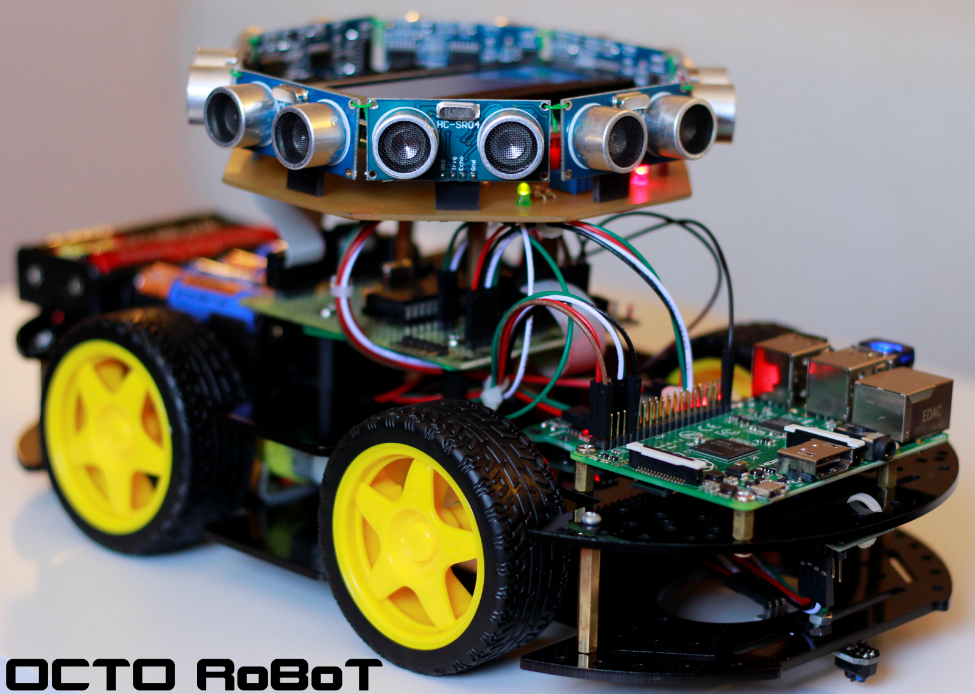
The multi-sonars have the main purpose of environment perception in 360º. The sonars were mounted in an octagonal pattern, corresponding to an orientation from cardinal and ordinal directions and resulting in reading distances oriented by a digital compass. Taking advantage of the wireless network structure, fifteen access points signal strengths were measured.
The dataset is divided in training and testing files. Each one has 23 inputs, corresponding to RSS and sonar measures, and two outputs, indicating true location in larger and smaller grids. The training set has 111 cases and the testing set has 47 cases.
| Space type |
LargerGrid | SmallerGrid | ||
| Grid size [cm] | Class | Grid size [cm] | Class | |
| Hall |
540 x 180 |
0 | 180 x 180 | 0 – 2 |
| 1 | 90 x 90 | 0 – 11 | ||
| Room |
240 x 240 |
2 | 120 x 120 | 0 – 3 |
| 3 | 60 x 60 | 0 – 14 | ||
How to obtain the Dataset
UFPR RSS Sonar Fingerprinting Map (UFPR-RSFM) dataset is released for academic research only and is free to researchers from educational or research institutes for non-commercial purposes.
Please click here for more info about obtaining this dataset.
References
If you use the UFPR RSS Sonar Fingerprinting Map (UFPR-RSFM) dataset in your research please cite our paper:
- MAGRIN, CARLOS EDUARDO SETENARESKI; TODT, EDUARDO. Hierarchical Sensor Fusion Method Based on Fingerprint kNN and Fuzzy Features Weighting for Indoor Localization of a Mobile Robot Platform. In: 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR). Recife: IEEE, 2016. http://ieeexplore.ieee.org/document/7783544/
Contact
Please contact Eduardo Todt (todt@inf.ufpr.br) with questions or comments.